Fahrdynamikregelung
Fahrdynamisch bietet der Allradantrieb über vier einzelne Motoren große Vorteile:
Nicht nur ist die übertragbare Längskraft durch die vier angetriebenen Räder größer, auch Fahrdynamikregelsysteme wie ESP oder ASR, die in Fahrzeugen mit Verbrennungsmotor nur über zusätzliche Aktorik realisiert werden können, lassen sich im Elektrofahrzeug mit Einzelradantrieb einfach implementieren.
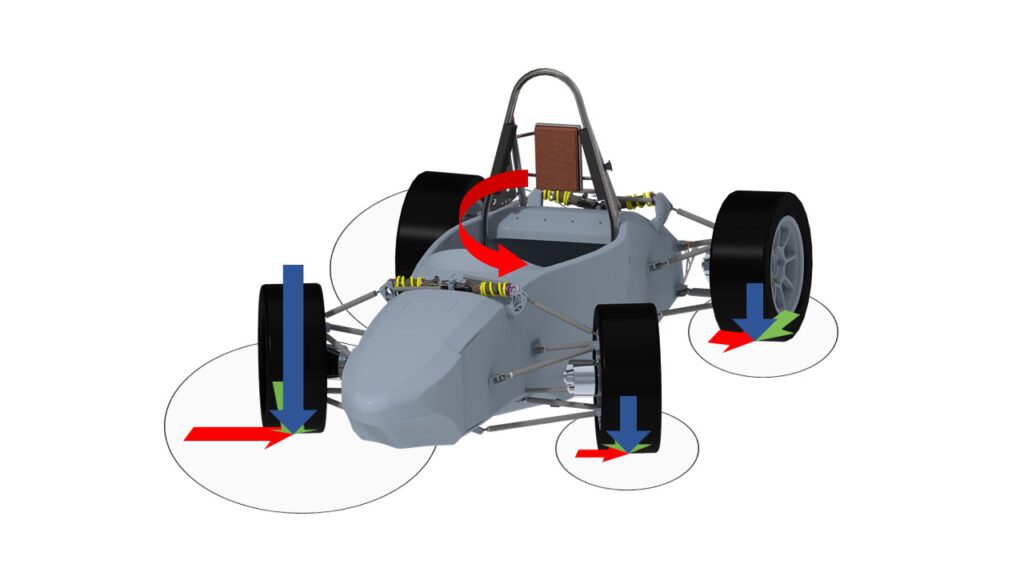
Insbesondere kann durch so genanntes Torque Vectoring kontinuierlich Einfluss auf das Fahrverhalten genommen werden. Dabei wird durch eine aktive Verteilung der Drehmomente auf die einzelnen Motoren ein zusätzliches Giermoment auf das Fahrzeug, d. h. ein zusätzliches Drehmoment um die Hochachse, erzeugt. Durch Torque Vectoring kann die Performance des Fahrzeugs gesteigert werden, außerdem lässt sich ein gewünschtes Fahrverhalten einstellen und für jeden Fahrer anpassen.
Die Fahrdynamikregelung in unserem Elektrorennwagen umfasst mehrere Funktionalitäten:
- Gierratenregelung durch Torque Vectoring
- Antriebsschlupfregelung
- einstellbare Steuertendenz des Fahrzeugs, d. h. Vorgabe des Unter- oder Übersteuerverhaltens
- höhere mögliche Querbeschleunigung durch optimale Kraftschlussausnutzung der Reifen
- rekuperatives Bremsen