Driving dynamics control
In terms of driving dynamics, the all-wheel drive with four individual engines offers great advantages:
Not only is the transmittable longitudinal force greater due to the four driven wheels, but also driving dynamics control systems such as ESP or ASR, which can only be realised with additional actuators in vehicles with a combustion engine, can be easily implemented in an electric vehicle with single-wheel drive.
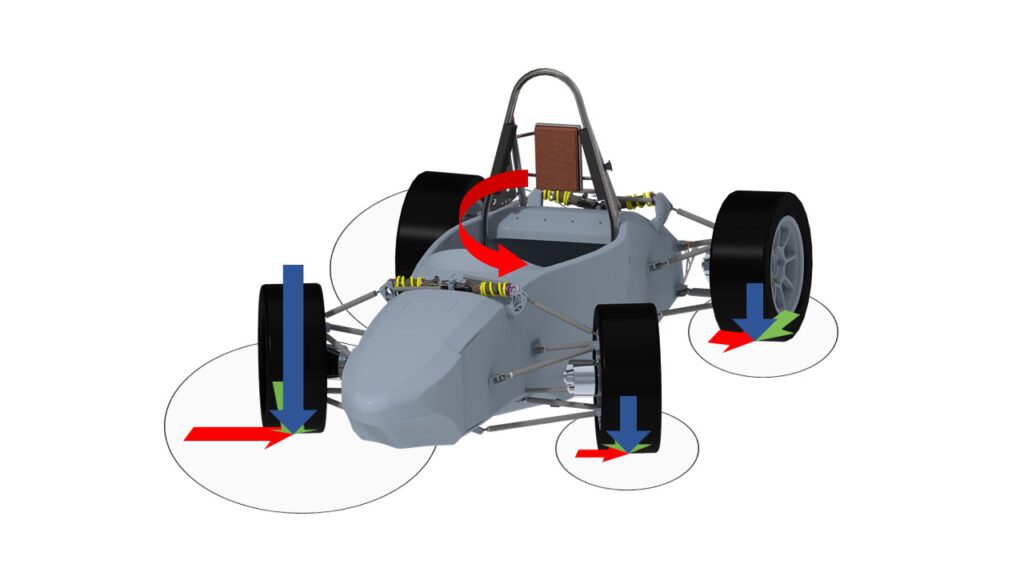
In particular, torque vectoring can be used to continuously influence the driving behaviour. By actively distributing the torque to the individual motors, an additional yaw moment is generated on the vehicle, i.e. additional torque around the vertical axis. Torque vectoring can increase the performance of the vehicle, and the desired driving behaviour can be set and adapted for each driver.
The driving dynamics control in our electric racing car includes several functionalities:
- Yaw rate control through torque vectoring
- Traction control
- Adjustable steering tendency of the vehicle, i.e. specification of understeer or oversteer behaviour
- Higher possible lateral acceleration due to optimum utilisation of tyre traction
- Recuperative braking